Source code
The source code for Custom Interfaces can be found in src/custom_interfaces.
Its README has been copied below.
Custom Interfaces¶
UBC Sailbot's custom interfaces ROS package. To add custom_interfaces to another ROS package, follow the instructions
here.
The terminology that we use in this document are the following:
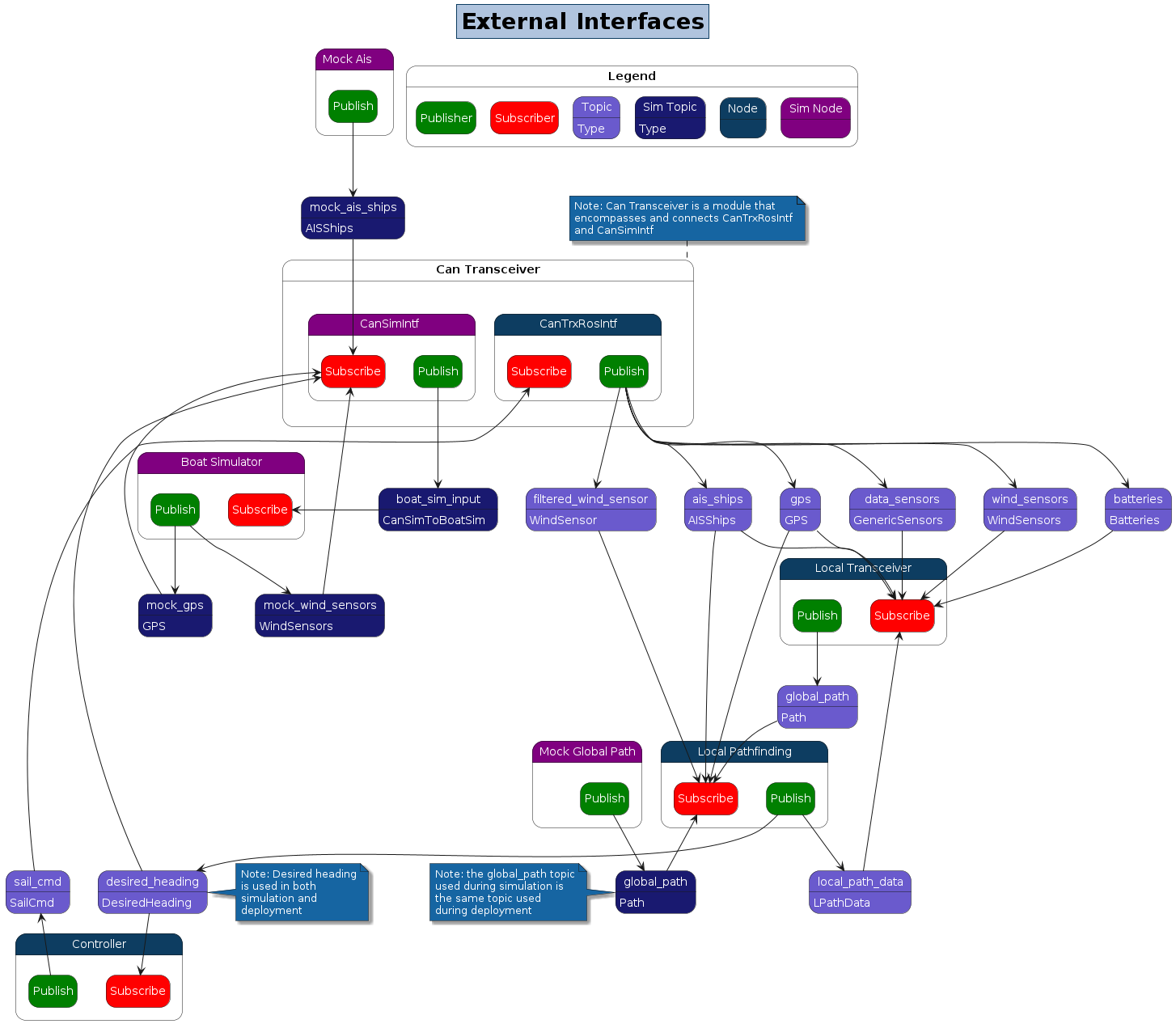
- External Interface: An interface used to communicate data between nodes and ROS packages.
- Internal Interface: An interface used to standardize conventions across external interfaces. Standards are
documented in the
.msgor.srvfile associated with that interface.
Project-wide Interfaces¶
ROS messages and services used across many ROS packages in the project.
Project-wide External Interfaces¶
Project-wide Internal Interfaces¶
| Interface | Used In |
|---|---|
| HelperAISShip | AISShips |
| HelperBattery | Batteries |
| HelperDimension | HelperAISShip |
| HelperGenericSensor | GenericSensors |
| HelperHeading | DesiredHeading, GPS, HelperAISShip |
| HelperLatLon | GPS, HelperAISShip, Path |
| HelperROT | HelperAISShip |
| HelperSpeed | GPS, HelperAISShip, WindSensor |
Boat Simulator Interfaces¶
ROS messages and services used in our boat simulator.
Boat Simulator External Interfaces¶
| Topic | Type | Publisher | Subscriber(s) |
|---|---|---|---|
mock_kinematics |
SimWorldState | Simulator Physics Engine | Simulator Visualizer |
Boat Simulator Actions¶
| Action | Client Node | Server Node |
|---|---|---|
| SimRudderActuation | Simulator Physics Engine | Simulator Low Level Controller |
| SimSailTrimTabActuation | Simulator Physics Engine | Simulator Low Level Controller |
Resources¶
Common Interfaces¶
The ROS2 common_interfaces repository defines a set of
packages which contain common interface files. Since we are using the Humble version of ROS2, see the humble branch.
These interfaces can be used in this repository or as a reference for ideas and best practices.
| Package | Possible Usage |
|---|---|
| diagnostic_msgs | Could be used for website sensors |
| geometry_msgs | Simulator, Local Pathfinding |
| sensor_msgs | Reference for CAN Transceiver |
| std_msgs | Reference |
| std_srvs | Reference |
| visualization_msgs | Reference |
For more detail on the usefulness of each package, see this issue comment. If you are interested in creating your own custom message or service, see the ROS Humble documentation.